

Mitteblokeeruv pidurisüsteem (ABS) jälgib sõiduki liikumise parameetreid vastavalt ühele või mitmele rattale paigaldatud andurite näidudele.Siit saate teada, mis on ABS-andur ja miks seda vaja on, mis tüüpi see on, kuidas see töötab ja millistel põhimõtetel selle töö põhineb - uurige artiklist.
Mis on ABS-andur
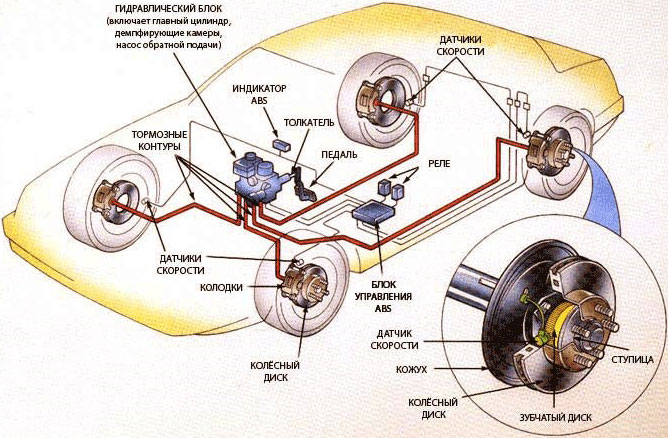
ABS-andur (ka auto kiirusandur, DSA) on erinevate elektrooniliste aktiivohutussüsteemide ja lisajuhtimissüsteemidega varustatud sõidukite ratta pöörlemiskiiruse (või kiiruse) kontaktivaba andur.Kiiruseandurid on peamised mõõteelemendid, mis tagavad mitteblokeeruva pidurisüsteemi (ABS), stabiilsuskontrollisüsteemi (ESC) ja veojõukontrolli töö.Samuti kasutatakse andurite näitu mõnes automaatkäigukasti juhtimissüsteemis, rehvirõhu mõõtmises, adaptiivses valgustuses jm.
Kõik kaasaegsed autod ja paljud teised ratastega sõidukid on varustatud kiiruseanduritega.Sõiduautodel on andurid paigaldatud igale rattale, tarbesõidukitele ja veoautodele saab andureid paigaldada nii kõikidele ratastele kui ka veotelgede diferentsiaalidesse (üks telje kohta).Seega saavad mitteblokeeruvad pidurisüsteemid jälgida kõigi rataste või veotelgede rataste seisukorda ning selle info põhjal teha muudatusi pidurisüsteemi töös.
ABS-andurite tüübid
Kõik olemasolevad DSA-d on jagatud kahte suurde rühma:
• Passiivne – induktiivne;
• Aktiivne — magnetoresistiivne ja põhineb Halli anduritel.
Passiivsed andurid ei vaja välist toiteallikat ja on kõige lihtsama konstruktsiooniga, kuid neil on madal täpsus ja mitmeid puudusi, nii et tänapäeval on neist vähe kasu.Aktiivsed ABS-andurid vajavad töötamiseks voolu, on mõnevõrra keerukama konstruktsiooniga ja kallimad, kuid annavad kõige täpsema näidu ja on töökindlad.Seetõttu on tänapäeval enamikele autodele paigaldatud aktiivsed andurid.
Igat tüüpi DSA-l on kaks versiooni:
• Sirge (ots);
•Nurk.
Otsesendurid on silindri või varda kujulised, mille ühte otsa on paigaldatud andurelement, teises - pistik või pistikuga juhe.Nurgaandurid on varustatud nurkpistikuga või pistikuga juhtmega, lisaks on neil poldiauguga plastikust või metallist kronstein.
ABS induktiivandurite disain ja töö
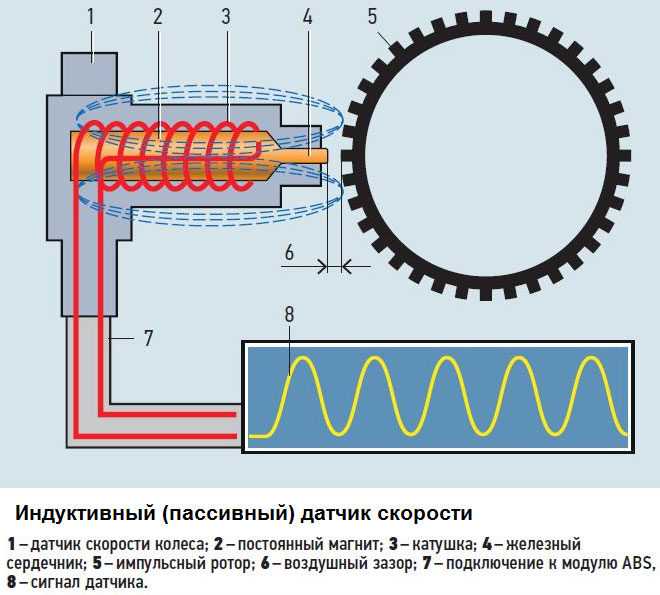
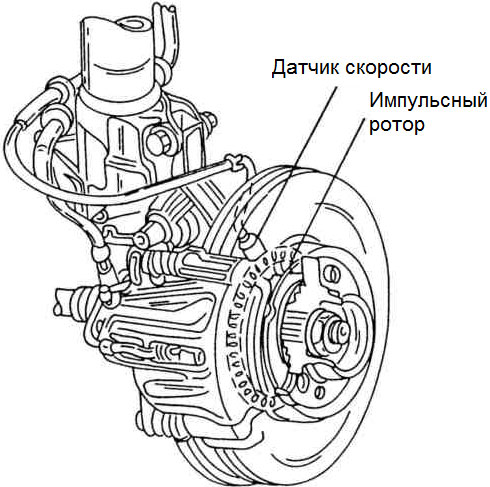
See on disainilt ja töös kõige lihtsam kiirusandur.Selle aluseks on õhukese vasktraadiga mähitud induktiivpool, mille sees on üsna võimas püsimagnet ja rauast magnetsüdamik.Magnetsüdamikuga mähise ots asub metallist hammasratta (impulssrootori) vastas, mis on jäigalt rattarummu külge kinnitatud.Rootori hammastel on ristkülikukujuline profiil, hammaste vaheline kaugus on võrdne või veidi suurem kui nende laius.
Selle anduri töö põhineb elektromagnetilise induktsiooni nähtusel.Puhkeolekus pole anduri mähises voolu, kuna seda ümbritseb pidev magnetväli - anduri väljundis pole signaali.Auto liikumise ajal liiguvad impulssrootori hambad anduri magnetsüdamiku lähedalt, mis viib mähist läbiva magnetvälja muutumiseni.Selle tulemusena muutub magnetväli vahelduvaks, mis vastavalt elektromagnetilise induktsiooni seadusele tekitab mähises vahelduvvoolu.See vool varieerub vastavalt siinuse seadusele ja voolu muutumise sagedus sõltub rootori pöörlemiskiirusest, see tähendab auto kiirusest.
Induktiivsetel kiirusanduritel on olulisi puudusi – need hakkavad tööle alles siis, kui teatud kiirus on ületatud ja moodustavad nõrga signaali.See muudab ABS-i ja teiste süsteemide madalatel kiirustel töötamise võimatuks ja põhjustab sageli vigu.Seetõttu annavad induktiivset tüüpi passiivsed DSA-d tänapäeval teed arenenumatele aktiivsetele.
Halli elemendil põhinevate kiirusandurite disain ja töö
Halli elementidel põhinevad andurid on oma lihtsuse ja töökindluse tõttu levinumad.Need põhinevad Halli efektil – magnetvälja asetatud tasapinnalises juhis põikpotentsiaali erinevuse esinemisel.Selliseks juhiks on mikroskeemi (Halli integraallülitus) asetatud kandiline metallplaat, mis sisaldab ka digitaalsignaali genereerivat hindavat elektroonilist vooluringi.See kiip on paigaldatud kiirusandurisse.
Struktuuriliselt on Halli elemendiga DSA lihtne: põhineb mikroskeemil, mille taga on püsimagnet ja ümber saab paikneda metallplaat-magnetsüdamik.Kõik see asetatakse korpusesse, mille tagaküljel on elektripistik või konnektoriga juht.Andur asub impulssrootori vastas, mis võib olla valmistatud kas metallist hammasratta või magnetiseeritud sektsioonidega rõnga kujul, impulssrootor on jäigalt kinnitatud rattarummule.

Halli anduri tööpõhimõte on järgmine.Halli integraallülitus genereerib pidevalt digitaalset signaali kindla sagedusega ruutimpulsside kujul.Puhkeolekus on sellel signaalil minimaalne sagedus või see puudub täielikult.Auto liikumise alguses lähevad andurist mööda magnetiseeritud sektsioonid või rootori hambad, millega kaasneb anduri voolu muutus - seda muutust jälgib hindamisahel, mis genereerib väljundsignaali.Impulsssignaali sagedus sõltub ratta pöörlemiskiirusest, mida kasutab mitteblokeeruv pidurisüsteem.
Seda tüüpi DSA-l puuduvad induktiivsete andurite puudused, need võimaldavad mõõta rataste pöörlemiskiirust sõna otseses mõttes alates auto liikumise esimestest sentimeetritest, on täpsed ja töökindlad.
Anisotroopsete magnetoresistiivsete kiirusandurite disain ja töö
Magnetoresistiivsed kiirusandurid põhinevad anisotroopsel magnetoresistiivsel efektil, mis on ferromagnetiliste materjalide elektritakistuse muutus, kui nende orientatsioon muutub konstantse magnetvälja suhtes.
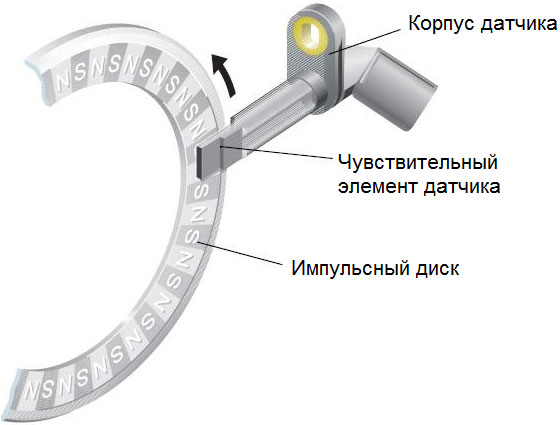
Sensori tundlik element on kahest või neljast õhukesest permalloy plaadist (spetsiaalne raua-nikli sulam) koosnev "kihikook", millele on kantud metalljuhtmed, mis jaotavad magnetvälja jooned teatud viisil.Plaadid ja juhid asetatakse integraallülitusse, milles on ka hindamisahel väljundsignaali moodustamiseks.See kiip on paigaldatud impulssrootori vastas asuvasse andurisse - magnetiseeritud sektsioonidega plastrõngasse.Rõngas on jäigalt kinnitatud rattarummule.
AMR-andurite töö taandub järgmiselt.Puhkeolekus jääb anduri ferromagnetiliste plaatide takistus muutumatuks, mistõttu ka integraallülituse genereeritud väljundsignaal ei muutu või puudub täielikult.Auto liikumise ajal läbivad impulsirõnga magnetiseeritud lõigud anduri sensorelemendist, mis toob kaasa magnetvälja joonte suuna muutumise.See põhjustab permalloy plaatide takistuse muutumise, mida jälgib hindamisahel - selle tulemusena genereeritakse anduri väljundis impulss-digitaalne signaal, mille sagedus on võrdeline auto kiirusega.
Tuleb märkida, et magnetoresistiivsed andurid võimaldavad jälgida mitte ainult rataste pöörlemiskiirust, vaid ka nende pöörlemissuunda ja peatumise hetke.See on võimalik tänu magnetiseeritud sektsioonidega impulssrootori olemasolule: andur ei jälgi mitte ainult magnetvälja suuna muutumist, vaid ka magnetpooluste läbimise järjestust sensorelemendist mööda.
Seda tüüpi DSA-d on kõige usaldusväärsemad, need tagavad suure täpsuse rataste pöörlemiskiiruse ja sõidukite aktiivsete turvasüsteemide tõhusa toimimise mõõtmisel.
Kiiruseandurite tööpõhimõte ABS-i ja muude süsteemide osana
Mitteblokeeruvatel pidurisüsteemidel on olenemata nendesse paigaldatud anduritest sama tööpõhimõte.ABS-i juhtseade jälgib kiirusanduritelt tulevat signaali ja võrdleb seda eelnevalt arvutatud sõiduki kiiruse ja kiirenduse näitajatega (need näidikud on iga auto puhul individuaalsed).Kui anduri signaal ja juhtseadmesse salvestatud parameetrid langevad kokku, on süsteem passiivne.Kui ühe või mitme anduri signaal erineb konstruktsiooniparameetritest (st rattad on blokeeritud), kaasatakse süsteem pidurisüsteemi, vältides rataste lukustumise negatiivseid tagajärgi.
Lisateavet mitteblokeeruvate pidurisüsteemide ja muude aktiivsete auto turvasüsteemide töö kohta leiate saidi teistest artiklitest.
Postitusaeg: 24. august 2023